Workshop in IEEE ITSC 2022: Intelligent Vehicle Meets Urban: Safe and Certifiable Navigation and Control for Intelligent Vehicles in Complex Urban Scenarios
Date:
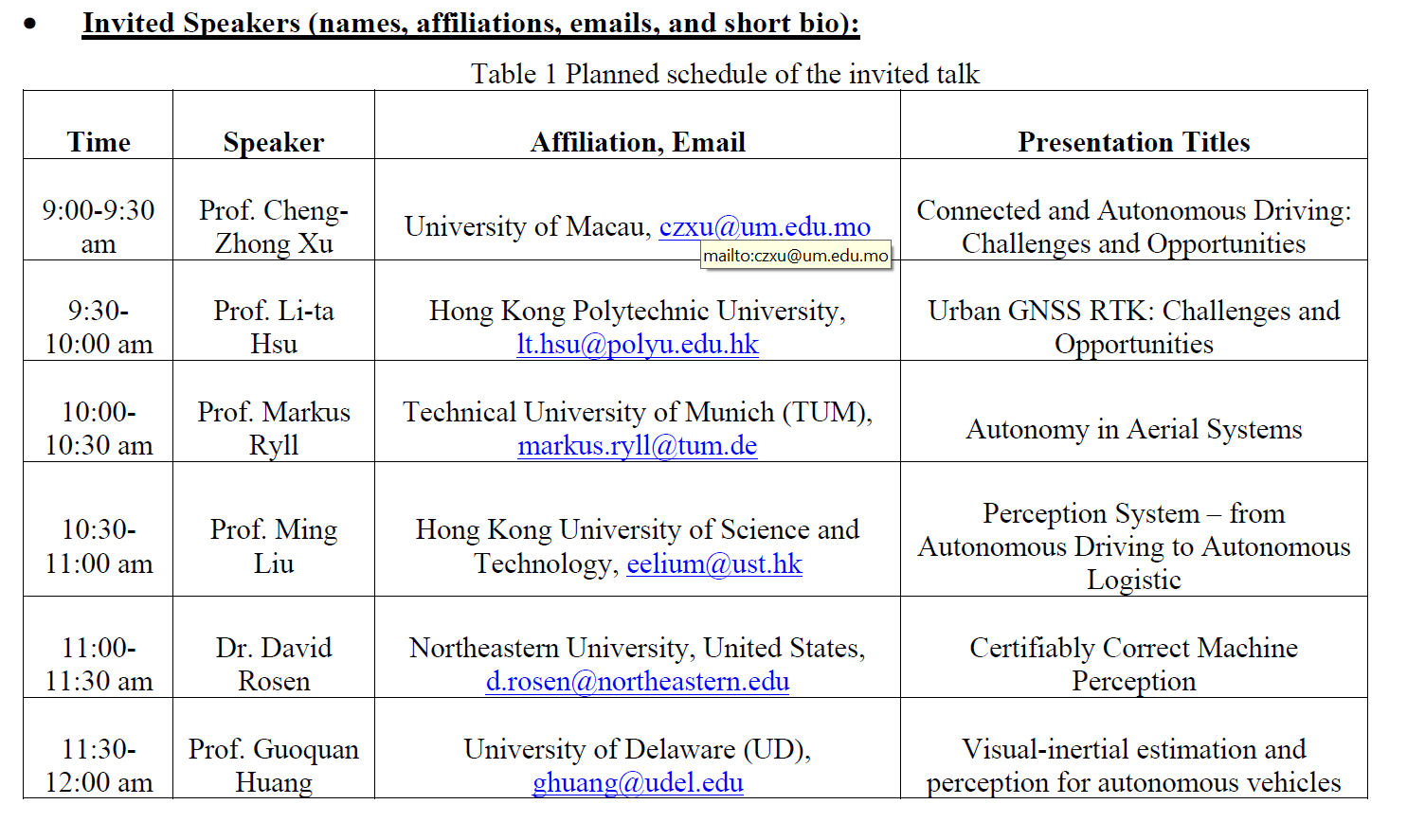
We organized a workshop session in IEEE ITSC 2022 with topic “Intelligent Vehicle Meets Urban: Safe And Certifiable Navigation And Control For Intelligent Vehicles In Complex Urban Scenarios” from at 09:00 - 12:00, 08 Oct 2022. More details can be found in our Workshop Website. We proundly invited the speakers including Prof. Guoquan Huang, Prof. Cheng-Zhong Xu, Dr. David M. Rosen, Prof Ming Liu, Prof. Markus Ryll and Dr. Li-Ta Hsu. The tencent meeting link is Tencent Meeting Link, Meeting ID is 265-418-897.
Abstract
Intelligent vehicles (IV) are well recognized to be the remedy of improving traffic efficiency, alleviating unexpected traffic accidents, and finally accelerating the arrival of smart cities. In the past decades, the key functions of IV systems had witnessed incredible development, such as localization, perception, and control. Satisfactory performance can be provided using those existing technologies in constrained or open areas, with limited participants. However, those functions are significantly challenged in complex urban scenarios with dense traffic congestions and complex environmental structures. For example, the existing localization solution using multi-sensor fusion via GNSS/IMU/LiDAR/HD Map is degraded. Specifically, the performance of the GNSS is degraded due to the tall building structures, leading to the multipath effects and the non-line-of-sight (NLOS) receptions. As a result, the GNSS positioning error can reach more than 10 meters which are not acceptable for the ADV. The LiDAR-based positioning is challenged by the dynamic objects. Moreover, the perception function is also degraded with unexpected blockage and dense surrounding objects. At the same time, today’s widely used AI algorithms for object detection are beginning to face fundamental limits and practical shortcomings. Many AI algorithms developed recently do not specifically quantify uncertainty; they do not assess the risks that uncertainty imposes on system safety and success; they do not guarantee the uncertainty bounds on this risk and these assessments in real-time are needed. Unsatisfactory performance both from localization and perception can lead to additional challenges to the control functions. In short, those functions rely heavily on each other and how to guarantee the performance of the existing functions in complex urban scenarios is still an open question. More importantly, the reliability of those key functions is important to the IV systems. Any unreliable solutions from localization, perception, and control can lead to the expected system catastrophic failure. Therefore, how to verify the correctness, risk of the derived solutions is one of the key issues for the massive deployment of the IV systems.
In this workshop, we wish to raise the awareness of the academic and industry on the challenges of the complex urban scenarios on the existing key functions of the IV systems with the aim of developing the solutions for safe and certifiable navigation and control for intelligent vehicles in complex urban scenarios. Those solutions are expected to account for uncertainty and risk of failure during their online execution, their capabilities for proactively quantifying and mitigating risks against task goals and safety constraints, and their ability to offer formal guarantees, such as bounds on the risk of failure. This workshop will include both invited speakers from academia and industry and the presentations from paper submissions. More importantly, this workshop will also invite the interdisciplinary topic from safety, correctness certification, and integrity monitoring in the aviation fields. This workshop will include but is not limited to the following topics:
- Certifiable Multi-sensor fusion for IV systems localization, including GNSS, IMU, LiDAR, Camera, High Definition Map.
- Certifiable and risk-aware perception, control, localization, and mapping;
- Formal methods for monitoring and verifying uncertain systems;
- Robust control of intelligent systems;
- System-level monitoring and risk quantification.
- System integrity monitoring and verification.